MAVLink2HoTT is AtMega328p firmware for Graupner RC users.
It works
with any autopilot, providing 57600 baud MAVLink stream on 3.3v or 5v TTL level UART.
It was
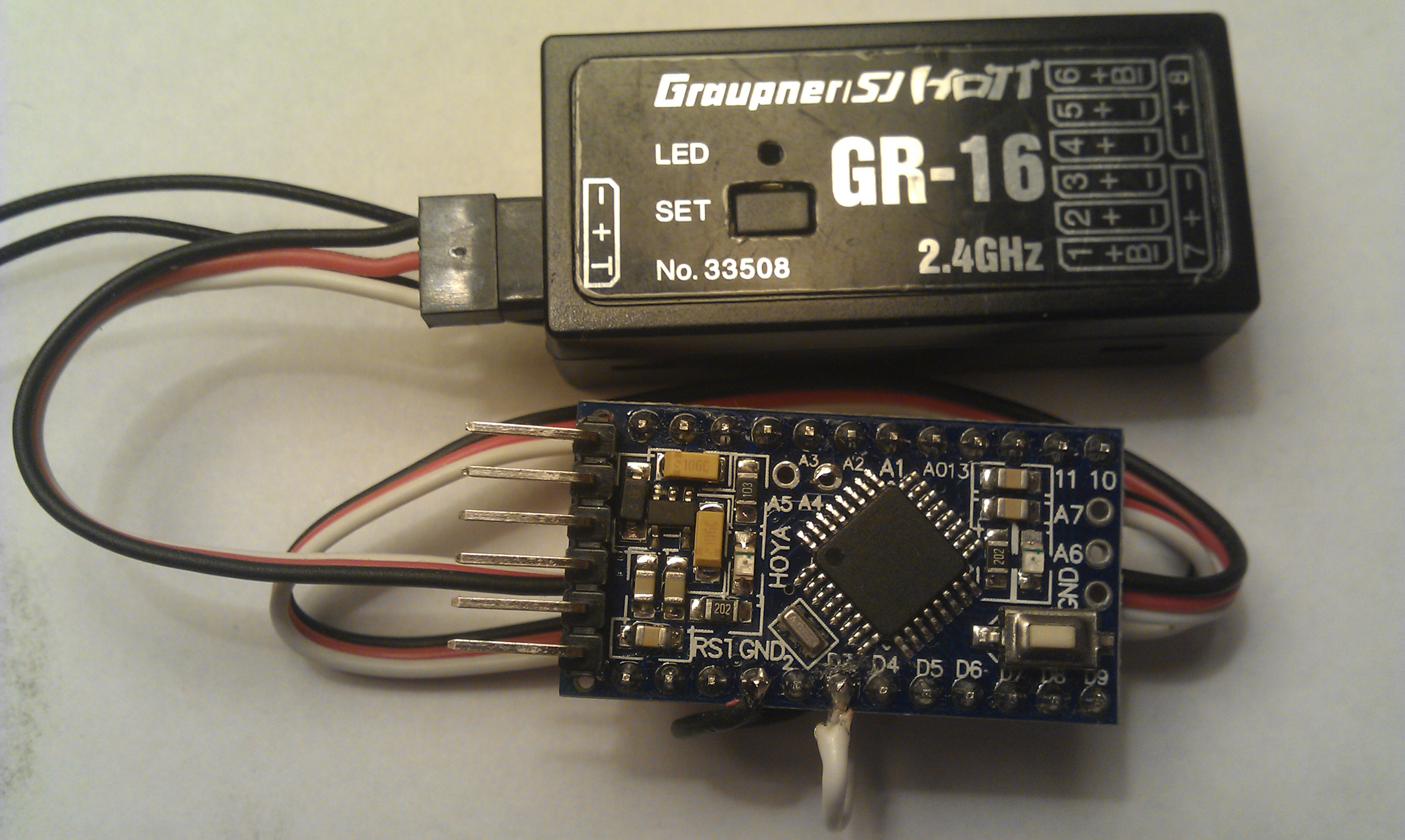
tested with APM 2.x and Pixhawk (original and clones). Graupner
MX-16 and MX-20 RCs were tested with GR-12, GR-16 and GR-24 receivers.
GR-12L was
also tested, but it doesn’t support text mode for configuration
and though it’s usability is limited.
Successful testing with MZ-24 was reported by Klaus.
Deepflights reported it to work with MC-32 and GR-16.
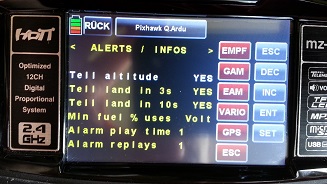
Another testing with MC-32 and pictures of MC-32 screen were made by Johannes Lang.
Incompatibility with USB-equipped boards was discovered by Kay Spranger.
Thank you all for your help!
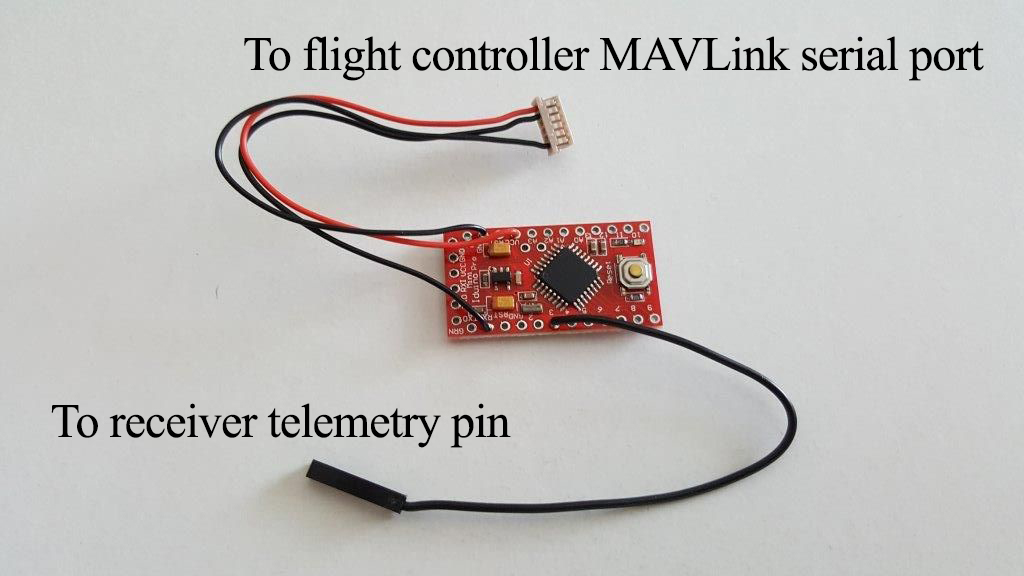
MAVLink2HoTT may be useful with flight controllers with small number of UARTs like some Linux-driven boards. With Pixhawk and even obsolete APM it provides HoTT telemetry support with stock firmware without any patches applied. Just connect it to MAVLink/telemetry port of FC (in parallel with telemetry transceiver or/and OSD module if there are any) and get HoTT telemetry working.
Current firmware v1.4.6 can be loaded into any non-USB AtMega328p 5v 16MHz board and provides emulation of Graupner sensors by receiving and translating MAVLink stream from FC.
Please be aware that AVR boards with on-board USB are known not to work correctly as hardware UART needed to receive MAVLink stream is wired for USB connection.
«Arduino pro mini» clone 5V 16 MHz board was used for development and testing of this firmware.
| Current version emulates: | Information shown on RC screen contains |
|
|
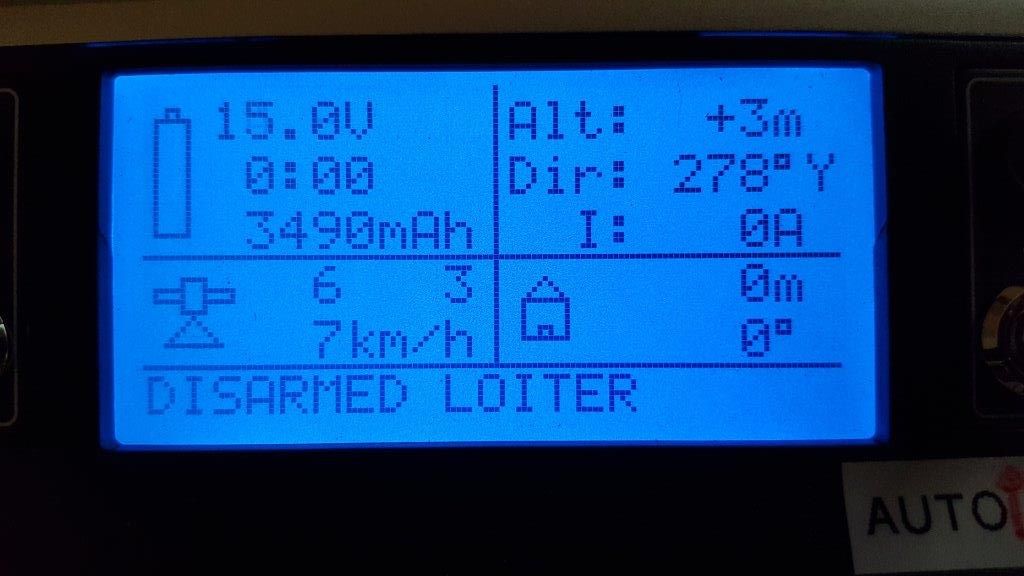
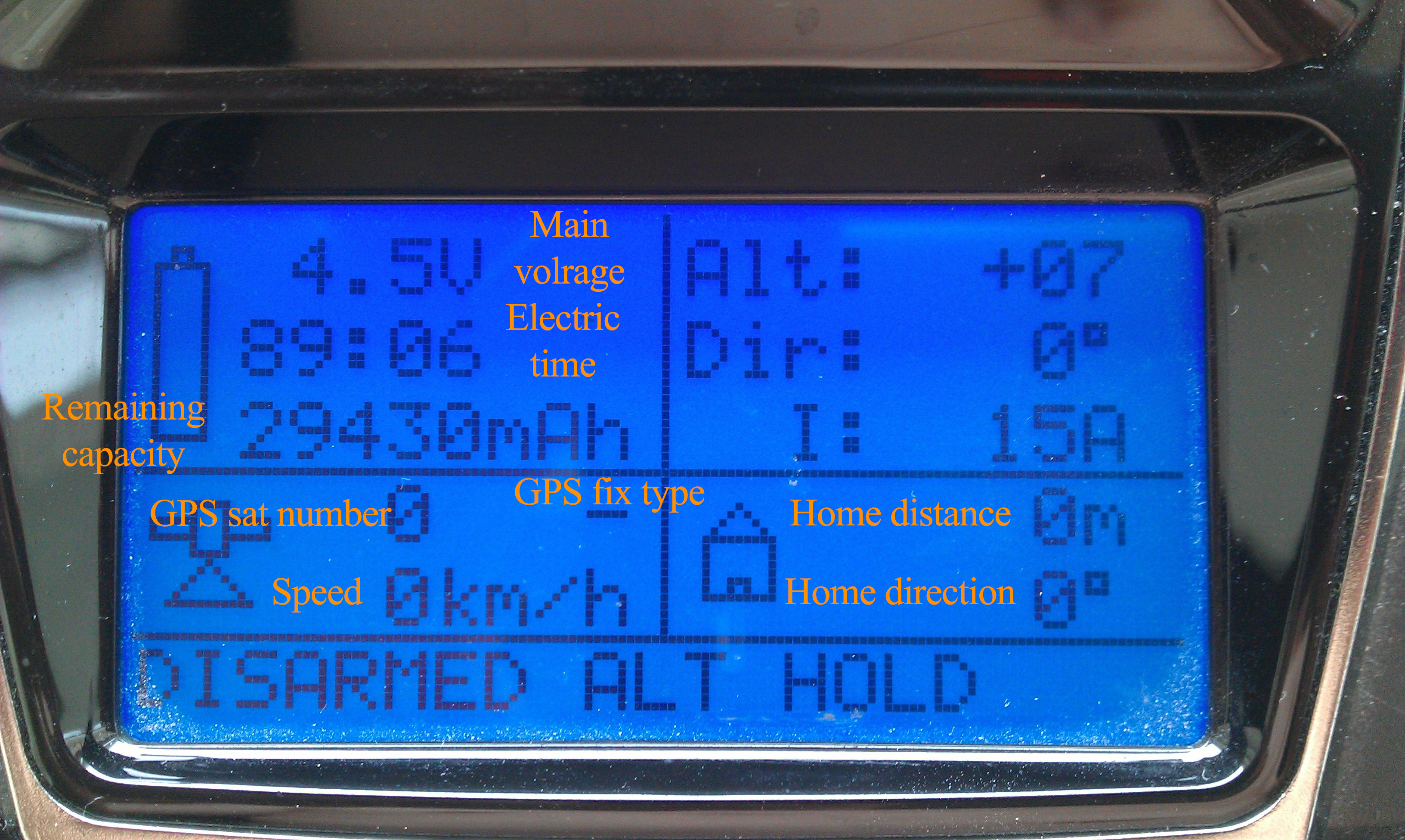
HoTT telemetry summary screen info as shown by RCEAM, VARIO or GPS modules emulation should be enabled for this screen to be shown For full information on this screen all three should be enabled |
||
|
Picture of summary screen in non-auto mode |
Summary screen in AUTO mode: |
|
 |
 |
 |
| Home section shows home distance and direction. "Y" character right to "Dir:" indicates YAW is displayed. |
Home section shows home distance and direction. Blank character right to "Dir:" means Dir=YAW function is disabled. |
Home section shows distance and direction to next WP Letters “W” and “P”indicate waypoint info is shown instead of home. |
MAVLink2HoTT setup screens as shown by RCs |
||||
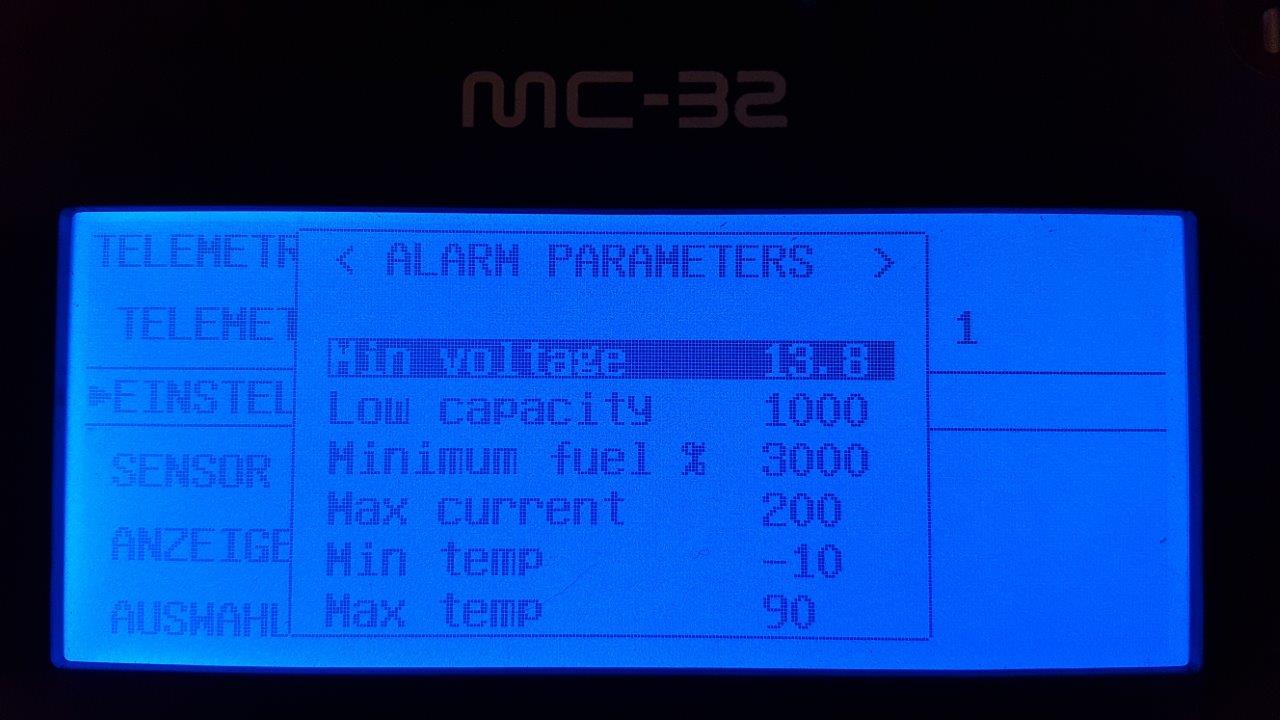
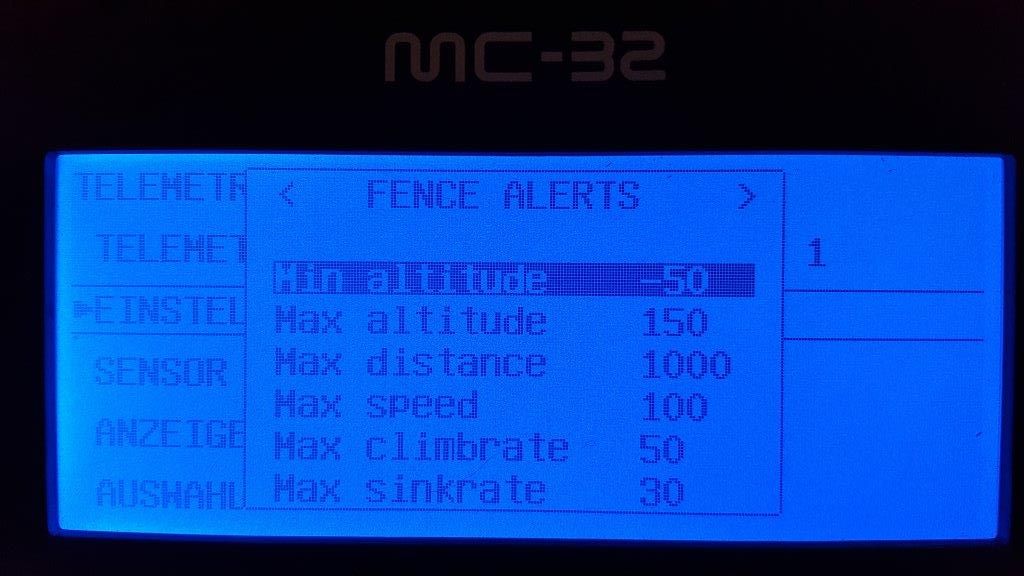
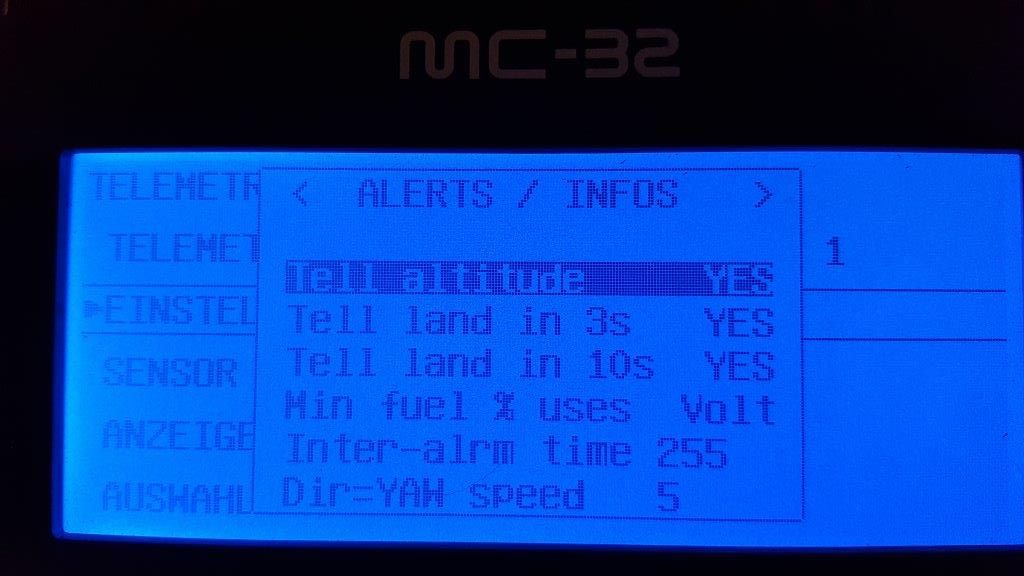
| Sensor emulation screen | Battery parameters screen | Alarm parameters screen | Fence alert setup screen | Alarm and info tuning screen |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
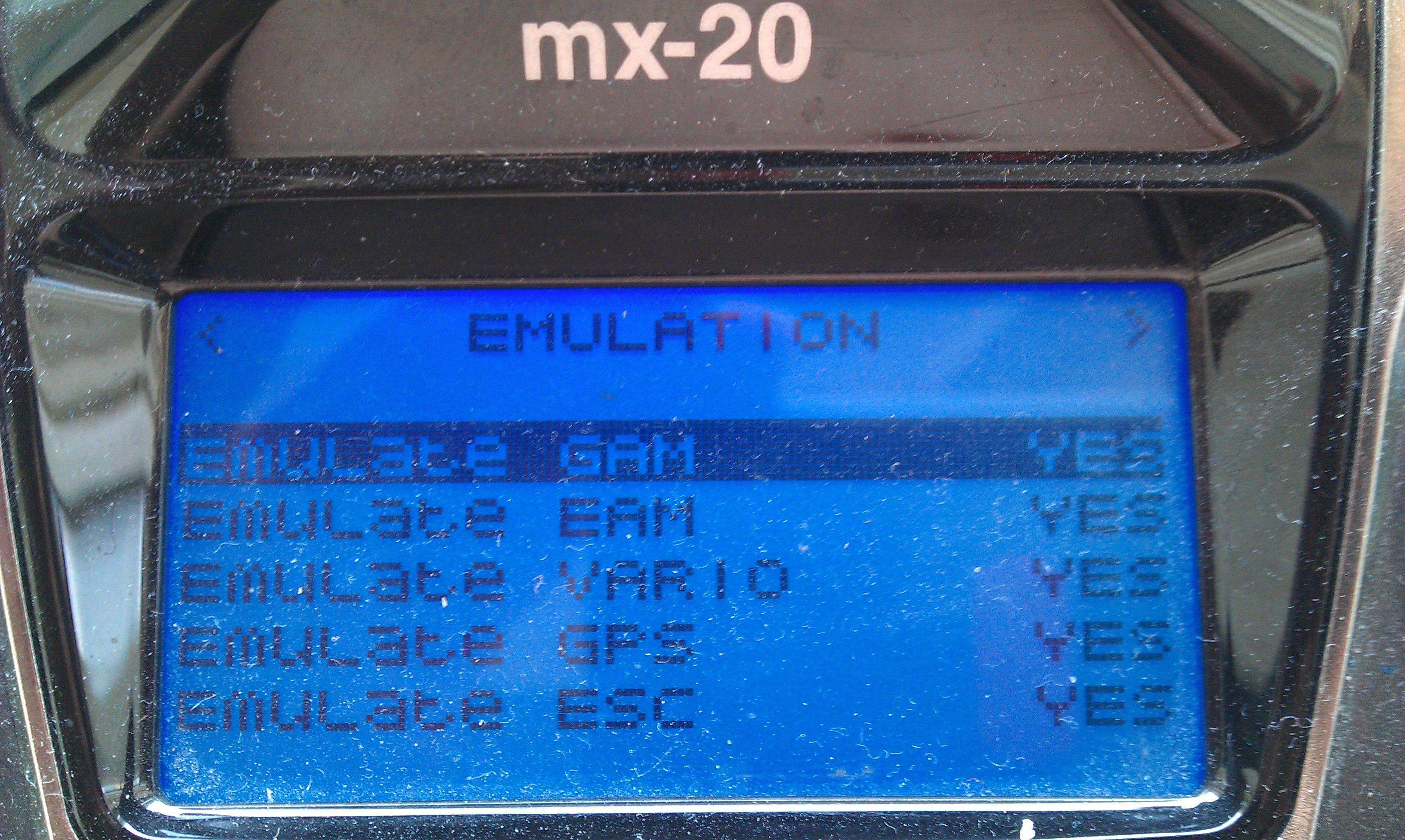
| Each virtual sensor may be turned on/off. |
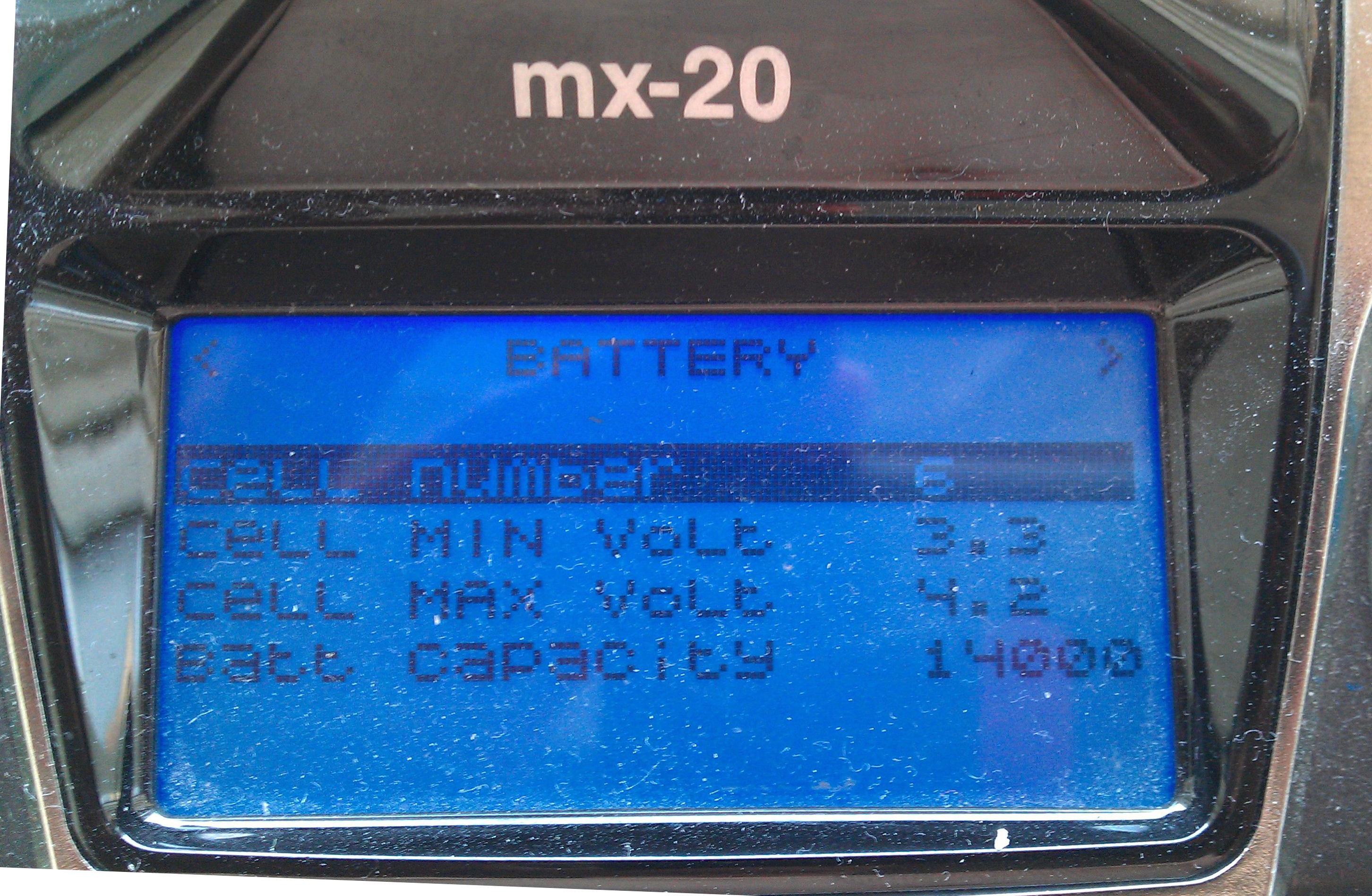
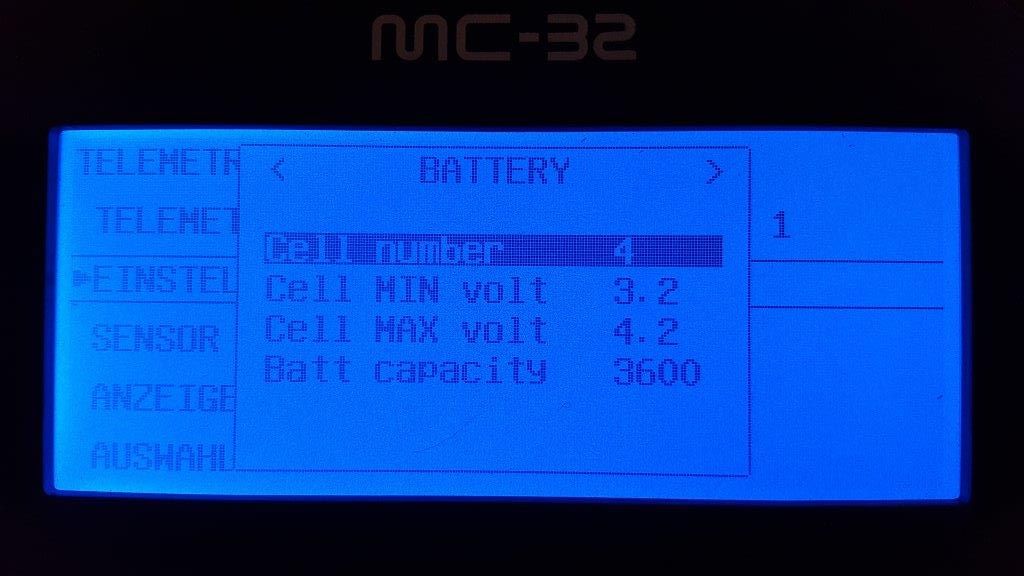
Cell count Minimum cell voltage Maximum cell voltage Battery capacity |
Minimum voltage Low battery capacity Low fuel percent Maximum current Minimal temperature Maximal temperature |
Minimal altitude Maximal altitude Maximal distance Maximum speed Maximum climb speed Maximum sink speed |
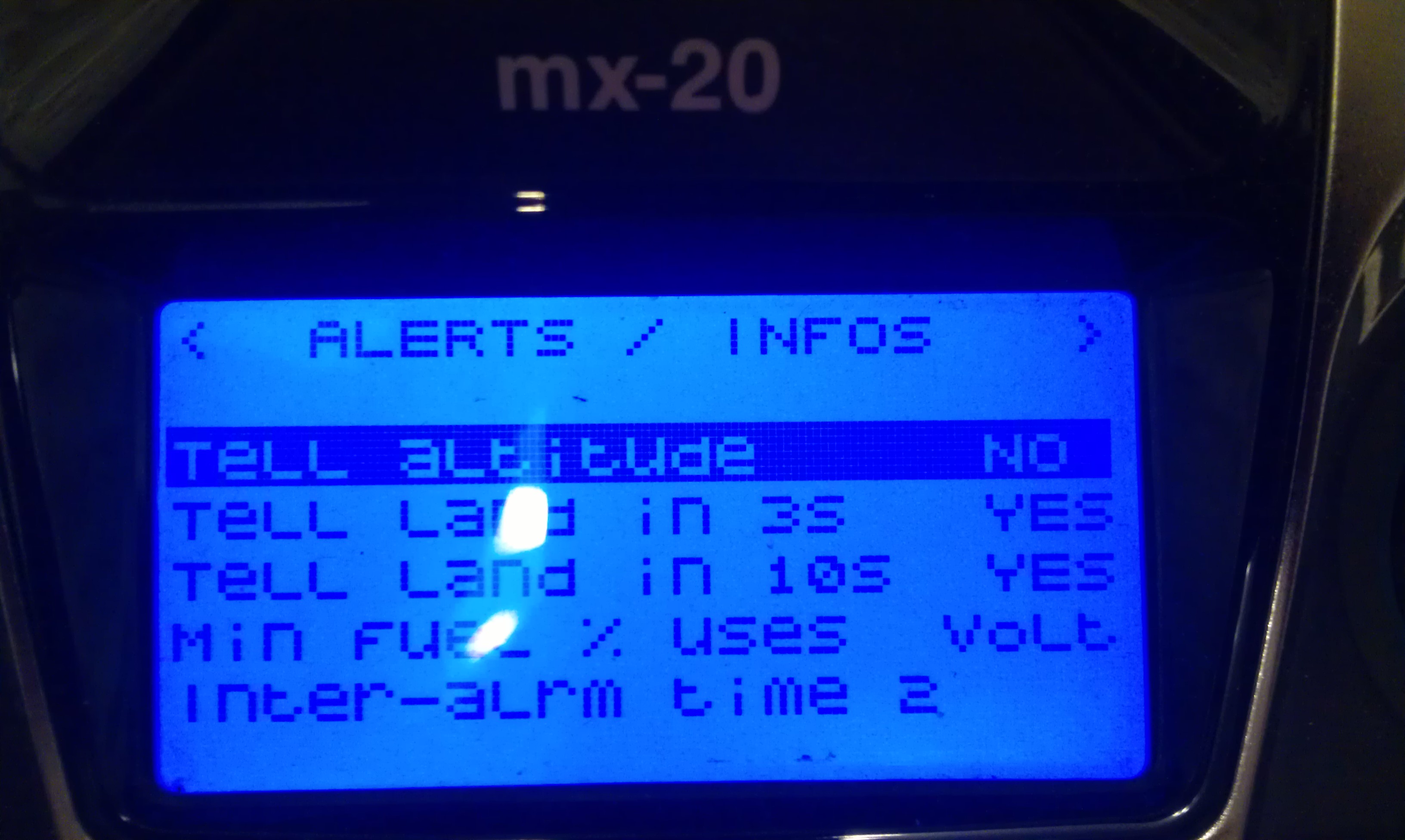
Tell altitude Tell land in 3s Tell land in 10s Min fuel % uses mAh or Volt Inter-alrm time Dir=YAW speed |
|
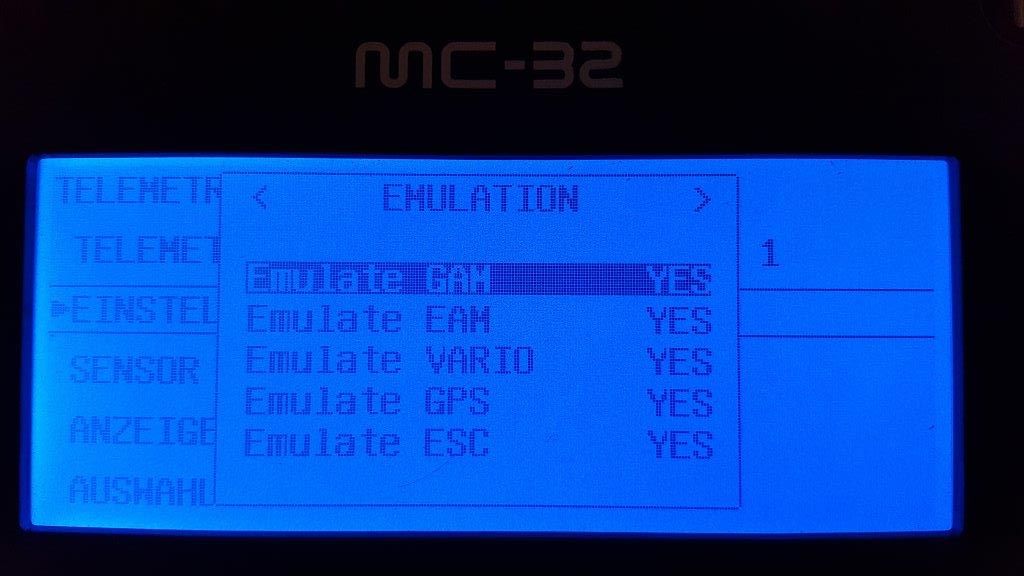
allows selecting what Graupner sensor modules will be emulated. As HoTT requests data 3 times per second and each sensor is requested twice, less sensors enabled will cause faster data update. Be sure to power cycle RC and receiver on model after changing emulation setup |
allows setting battery parameters. All of these parameters are mandatory as they are used in internal calculations. Cell number = number of cells in battery used
Cell min and max voltage and capacity are used to calculate battery health "Minimum input voltage" alarm is raised if battery voltage is beyond minimum. Battery field in summary display is inverted and voice alert is sent to RC. This alarm is mandatory and may be disabled only in RC voice alert trigger menu. |
provides parameters for user-configurable alarms « Min voltage »
Low capacity raises "Capacity" alarm when remaining capacity is less or equal to parameter value. May be switched off. Minimum fuel % controls "Minimum fuel" alarm activation.
In capacity mode it will be triggered when remaining battery capacity is lower or equal to desired percent value.
In voltage mode it will be triggered when battery voltage will be equal or lower than desired percent of useable battery voltage range. Max current, min and max temperature control corresponding alarms. These alarms are optional and may be turned off. |
is used to control fence alarm settings such as
These alarms are optional and may be turned off. |
contains some more tuning parameters. If “Tell altitude” is on, you’ll get voice info when UAV passes 20,40,80,100,200,400,800 and 1000 meter boundaries up or down. Tell land in 3 seconds activates "Negative difference 3 seconds" voice alarm if UAV with current sink speed will meet land in 3 seconds. Tell land in 10 seconds activates "Minimum altitude" voice alarm if UAV with current sink speed will meet land in 10 seconds. If “Min fuel % uses” is set to “volt” minimum fuel alert will be triggered (if enabled) when current main voltage passes boundary of desired percent between battery maximum and battery minimum. Eg. if max cell voltage is 4.2v, min cell voltage is 3.2v and battery contains 6 cells (all set in battery screen) and low fuel alarm is 20%, then alarm will be triggered at 6*(3.2+20%*(4.2 – 3.2))=20.4v. If “Min fuel % uses” is set to “mAh”, alert will be triggered at desired percent of battery capacity remaining. Eg. if capacity is 10000 mAh and low fuel alarm is 20%, alarm will go when there’s 2000 mAh or less. "Inter-alrm time" parameter defines minimal interval in seconds between voice alarms are sent to RC. "Dir=YAW speed" parameter defines ground speed threshold (in m/s) for switching summary screen "Dir" field to display YAW instead of travel direction. If enabled (this also requires GPS and VARIO sensors to be enabled), "Dir" field of summary screen displays YAW when ground speed is lower or equal to parameter value, when motors are disarmed and also when there's no GPS lock. "Y" character appears right to "Dir" value indicating YAW is displayed. "G" character at same place tells that GPS direction is displayed. This also means GPS data is available and consistent. No character shown means this function is disabled and GPS travel direction is displayed if available. |
Editing configuration is done with RC cursor keys and SET key. It has two modes: SELECT mode and EDITING mode
SELECT mode is initial and allows parameter selection for further editing.
Keys functions in SELECT mode:
Left/Right keys select active pageUp/Down keys select active row.
SET key activates parameter editing.
In EDITING mode Up/Down keys increase/decrease value,
Left key
sets value to OFF (if allowed),
Right key sets value to default,
SET
key saves value and exits editing mode.
|
||
This firmware uses custom low-footprint interrupt-driven half-duplex software serial library and must use PIN 3 (D3) of AtMega328p chip. Use direct connection from PIN 3 to T-pin of
Graupner receiver. |
|
|
|
Data provided by MAVLink2HoTT Graupner sensor modules emulation
|
Alarms provided by MAVLink2HoTT sensor modules emulation
If alarm is to be used at least one sensor emulation supporting desired alarm should be enabled. Eg. if max alt alarm is wanted to work GAM or VARIO or GPS sensors emulation enabled will provide both inverse display and voice alarm. EAM will provide inverse display only. |
TroubleshootingPlease, follow these steps to check your setup: |
|
All firmware versions are HERE.
© 2013-2025 Michel Kosloff